Du GPS au RTK : panorama du positionnement satellite de précision
Comme évoqué dans un article précédent, le signal GPS est affecté par un certain nombre d’effets atmosphériques qui dégradent la précision du positionnement du récepteur. Dans cet article, nous présenterons la structure du signal GPS, ce qui permettra d’expliquer les effets qu’il subit lors de sa traversée de l’atmosphère, et finirons en évoquant des méthodes qui permettent de compenser ces effets pour améliorer la précision du système.
Structure du signal GPS
Pour bien comprendre la manière dont fonctionne un récepteur GPS, les facteurs qui affectent sa performance, ainsi que les manières d’en améliorer le fonctionnement, il est nécessaire de détailler la structure du signal émis par les satellites. Cet article décrit le signal historique dit “legacy” du système GPS; un nouveau standard est en cours de déploiement, mais son principe de fonctionnement et les effets qu’il subit restent semblables à ceux du signal historique.
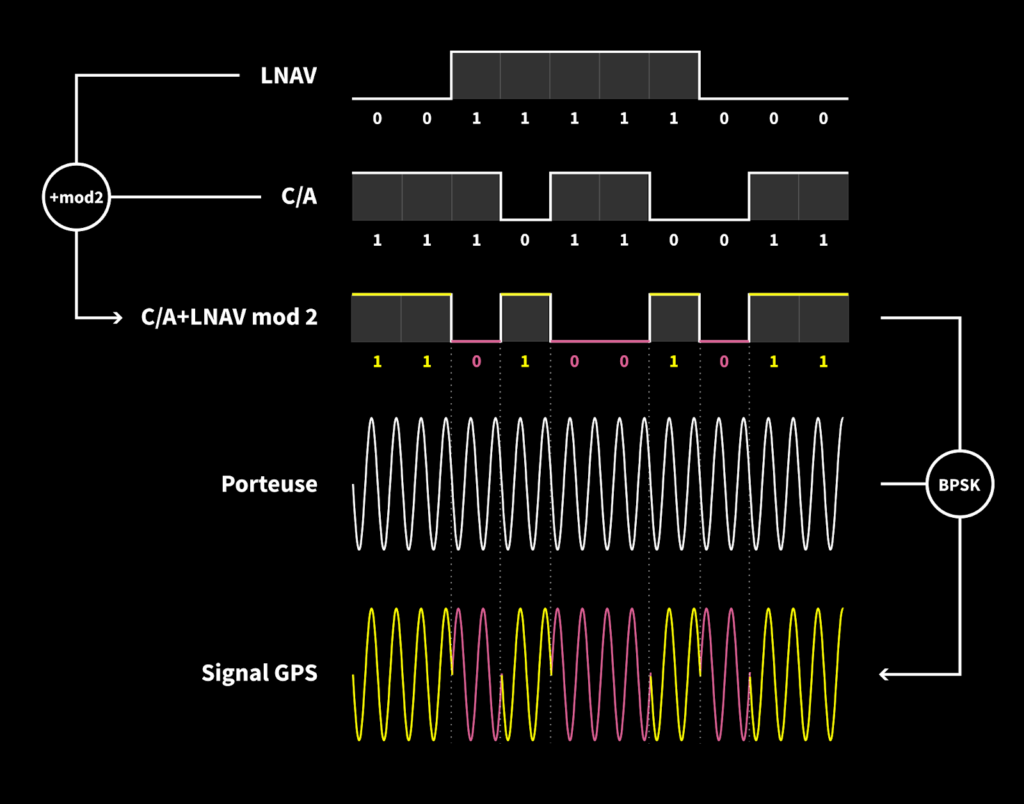
Le signal radio GPS émis par l’antenne d’un satellite est en réalité un mélange de plusieurs signaux, ayant des fonctions distinctes :
- Le “Coarse/Acquisition code” ou code C/A, propre à chaque satellite, est une séquence binaire émise à 1,023 Mbits/s. Il sert à estimer la distance entre le récepteur et le satellite (voir chapitre suivant).
- Le signal de navigation, ou LNAV, contient diverses informations, notamment l’heure et la position des satellites via l’almanach et l’éphéméride. L’almanach est une représentation peu précise de la position de l’ensemble des satellites de la constellation GPS, tandis que l’éphéméride contient des informations de positionnement bien plus précises concernant le seul satellite qui l’émet.
En toute rigueur, le système GPS utilise également un autre signal non public, dit de précision ou code P, dont l’usage est réservé à des applications militaires. Nous ne l’évoquerons pas dans cet article.
Le code C/A et le LNAV sont tous les deux des signaux à assez basse fréquence. Afin qu’ils se propagent mieux dans l’atmosphère, ils sont modulés par un signal à très haute fréquence, une porteuse ayant de meilleures propriétés de propagation. Dans le cas du GPS, le code C/A et le LNAV sont modulés par une porteuse à 1575,42 MHz (cette fréquence est appelée L1).
Utilisation du signal par les récepteurs GPS
Comme évoqué dans l’article « Au-delà du GPS, les défis de la localisation », le principe de fonctionnement du système GPS repose sur la capacité du récepteur à mesurer la distance qui le sépare des différents satellites de la constellation.
En pratique, pour estimer cette distance, on mesure le temps qu’a mis le signal à voyager entre le satellite et l’antenne du récepteur. Deux exemplaires du code C/A sont générés en même temps : à bord du satellite et dans le récepteur. La mesure du temps de parcours du signal émis par le satellite se fait alors en mesurant le décalage temporel (dt) entre le signal capté par l’antenne, et celui généré à bord du récepteur.
La précision de positionnement du GPS va donc dépendre de la capacité du récepteur à mesurer le décalage temporel des deux signaux. En fonction de la qualité de son électronique, la précision ira de quelques mètres dans le cas classique à quelques millimètres pour du matériel de très haute qualité.
Les récepteurs GPS classiques sont capables d’aligner temporellement les signaux avec une précision de l’ordre d’un centième de la durée d’un bit. La durée d’un bit du code C/A étant de 1,023 microseconde, le délai de propagation du signal peut donc être estimé avec une précision de l’ordre de 10 nanosecondes : en supposant que le signal voyage à la vitesse de la lumière, la distance entre le récepteur et le satellite peut donc être estimée avec une précision de l’ordre de 10 ns × 300000 km/s = 3 mètres. Ce rapide calcul permet d’expliquer pourquoi la précision de positionnement d’un récepteur GPS est de l’ordre de quelques mètres.
Une autre méthode pour estimer la distance consiste à utiliser l’information de la porteuse plutôt que celle du code C/A. L’avantage est que, la porteuse étant à une fréquence 1540 fois plus élevée que le code C/A, on peut s’attendre à une précision 1540 fois meilleure, de l’ordre de 2 mm. Réaliser l’alignement des porteuses est néanmoins nettement plus complexe d’un point de vue technique, et nécessite du matériel de très haute qualité, réservé aux applications pour lesquelles des précisions extrêmes sont requises, comme la géodésie ou l’étude de la dérive des continents.
Effets atmosphériques
Au cours de son voyage entre l’antenne du satellite située à 2000 km d’altitude et celle du récepteur, le signal GPS va traverser les diverses couches de l’atmosphère, qui vont l’affecter et sont à l’origine d’erreurs dans l’estimation de la position du récepteur.
La première couche traversée par le signal à sa sortie du satellite est l’ionosphère, siège des aurores boréales. Couche la plus élevée de l’atmosphère située entre 60 et 1000 km d’altitude, elle est soumise au rayonnement ultraviolet en provenance du Soleil. Les UVs, en interagissant avec les gaz présents à cette altitude, vont les ioniser en leur arrachant des électrons. Ces gaz ionisés, ou plasma, sont un milieu dispersif, c’est-à-dire que des ondes électromagnétiques à des fréquences différentes vont s’y propager à des vitesses différentes.

Or, il découle de ce que nous avons vu au premier chapitre que le signal GPS est composé d’un mélange de signaux à des fréquences différentes : la traversée de l’ionosphère va donc y induire des distorsions.
En pratique, les codes C/A et LNAV subissent un ralentissement apparent, tandis que la porteuse semble accélérée. L’effet ionosphérique tend donc à augmenter artificiellement la mesure de la distance séparant les satellites du récepteur.
La densité du plasma ionosphérique est très variable au cours du temps et dépend d’un grand nombre de facteurs, tels que le cycle jour-nuit, la météo solaire ou la position de la Terre autour du Soleil, qui la rendent difficilement prévisible.
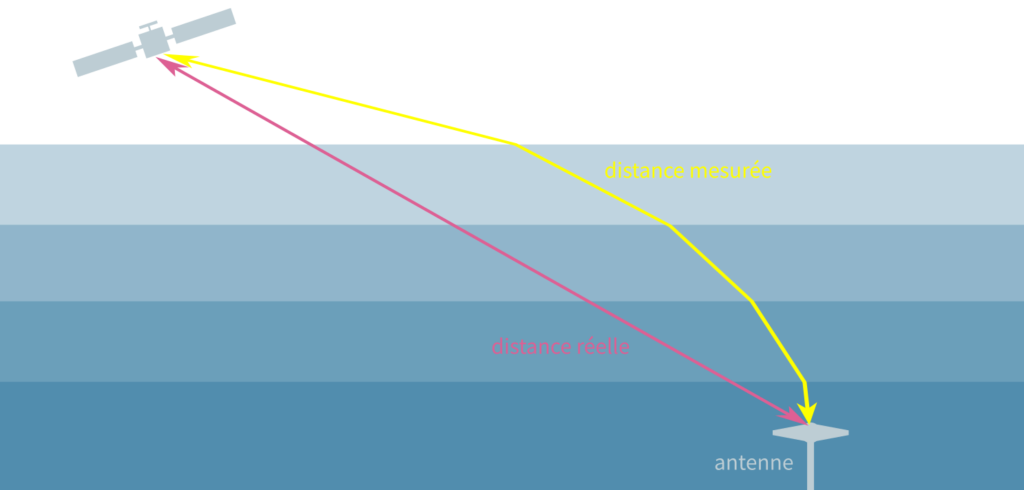
Après avoir traversé les couches supérieures de l’atmosphère, le signal pénètre alors les couches inférieures plus denses, et d’autant plus denses que l’altitude diminue. La variation de densité de l’atmosphère dans ces couches basses induit une variation de son indice de réfraction, ce qui a pour conséquence de dévier le trajet des ondes électromagnétiques qui ne se déplacent alors plus en ligne droite. Les mirages sont une illustration extrême de cet effet : ils sont causés par une forte variation de l’indice de réfraction de l’air dûe à de fortes différences de température, donc de densité.
Le récepteur GPS faisant l’hypothèse que le signal s’est propagé en ligne droite, la réfraction aura donc pour effet de lui donner l’impression qu’il est situé plus loin du satellite qu’il n’est réellement.
L’ensemble de ces effets contribue à dégrader la précision du positionnement, ce qui explique que contrairement à ce qui a été calculé précédemment, la précision d’un récepteur GPS est classiquement de l’ordre de 5-10 mètres.
Le GNSS différentiel comme réponse aux effets atmosphériques
Pour pallier les effets atmosphériques évoqués ci-dessus, des systèmes dits d’augmentation du GNSS ont été développés, parmi lesquels le SBAS (Satellite-Based Augmentation System), le LBAS (Local-Based Augmentation System) et le RTK (Real-Time Kinematic).
Leur principe, dit de GNSS différentiel, est similaire et repose sur l’utilisation d’un réseau de récepteurs de référence, placés à des positions fixes et connues avec précision. Chaque station de référence calcule sa position à partir des signaux provenant des satellites et la communique à un système central. Ce dernier, sachant la position réelle des récepteurs de référence, détermine en ensemble de corrections à appliquer pour correctement estimer la position d’un récepteur. Ces corrections sont ensuite diffusées aux utilisateurs qui peuvent les appliquer à la position calculée par leur récepteur pour en améliorer la précision.
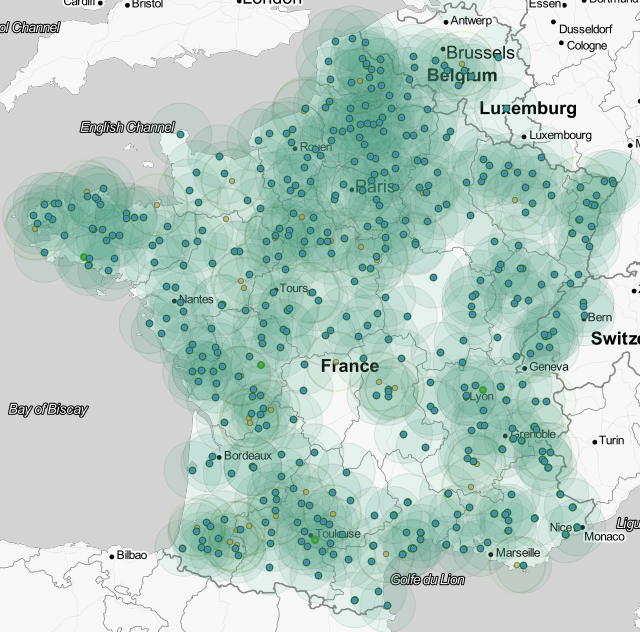
Carte des bases RTK Centipede et de leur zone de couverture
Ces systèmes d’augmentation sont caractérisés par le fait qu’ils couvrent une zone géographique limitée, déterminée par l’étendue du réseau de récepteurs de référence, ainsi que par la portée du dispositif de diffusion des corrections.
Le LBAS est typiquement utilisé pour des zones de faible étendue, par exemple autour d’aéroports, pour améliorer la fiabilité du positionnement des avions lors des phases de décollage et d’atterrissage : les données de corrections sont dans ce cas transmises par radio ou réseau cellulaire.
Le SBAS offre une couverture bien plus large, à l’échelle continentale, en diffusant les données de correction via des satellites de télécommunications, et en s’appuyant sur un réseau de stations de référence très étendu mais peu dense : les stations sont typiquement espacées de plusieurs centaines de kilomètres. Les systèmes SBAS les plus connus sont le WAAS états-unien et l’EGNOS européen.
Ces deux systèmes s’appuient tous deux sur l’utilisation du code C/A pour déterminer la position des stations et du récepteur : la précision en positionnement d’un récepteur utilisant une augmentation LBAS ou SBAS est de l’ordre d’un mètre.
Enfin, le RTK, possiblement le plus célèbre de tous les systèmes d’augmentation, s’appuie sur un réseau dense de stations de référence, typiquement séparées d’une dizaine de kilomètres, et sur les réseaux télécom pour diffuser les corrections. Contrairement aux LBAS et SBAS, un récepteur RTK utilise la porteuse pour estimer sa position, ce qui permet après correction d’obtenir une précision de positionnement généralement comprise entre 1 et 10 cm. Le RTK est utilisé dans de nombreuses applications, allant de l’agriculture aux voitures autonomes.
Conclusion
En résumé, nous avons plongé au cœur de la complexité du signal GPS, comprenant sa structure et son utilisation par les récepteurs pour déterminer notre position. Cependant, le voyage de ce signal à travers l’atmosphère terrestre n’est pas sans embûches. Les effets atmosphériques, tels que l’ionosphère et la réfraction, induisent des erreurs dans les calculs de positionnement, limitant la précision du GPS à quelques mètres.
Face à ces défis, des systèmes d’augmentation du GNSS, tels que le SBAS, le LBAS et le RTK, ont été développés. Ils utilisent des réseaux de stations de référence pour calculer des corrections qui améliorent considérablement la précision de la localisation, allant jusqu’à quelques centimètres pour le RTK.
Cependant, certaines problématiques évoquées lors de notre précédent article comme le multi-trajet, la navigation souterraine ou la garantie de disponibilité ne peuvent pas être corrigées par les améliorations discutées dans cet article. Ces systèmes sont de plus souvent coûteux et donc difficiles à intégrer dans une flotte de véhicules. Nous verrons dans un prochain article qu’il existe malgré tout des solutions à ces problèmes.
Rejoignez-nous sur notre page linkedin pour ne pas rater la publication de notre prochain article.