
Au-delà du GPS, les défis de la localisation
Depuis sa démocratisation dans les années 1980, le GPS est devenu une technologie incontournable de la vie quotidienne et dans de nombreuses industries, permettant à quiconque de connaître sa localisation, n’importe où sur la planète, pour s’orienter ou naviguer. Dans cet article, nous allons explorer le fonctionnement de ce système, ses limites et les défis à dépasser pour les applications telles que la conduite autonome ou la localisation en milieu souterrain.
La navigation par satellite, en bref comment ça marche ?
Le GNSS (Global Navigation Satellite System) est le nom générique donné aux différents systèmes de positionnement satellitaires. Les principaux aujourd’hui actifs sont le GPS (Global Positioning System), développé pour un usage initialement militaire par les États-Unis dans les années 1970, Galileo, mis en service par l’Union Européenne en 2016, ainsi que GLONASS et BeiDou respectivement développés et opérés par la Russie et la Chine.
Un système GNSS fournit à tout utilisateur équipé d’un récepteur sa position géographique en trois dimensions, ainsi que la date et l’heure.
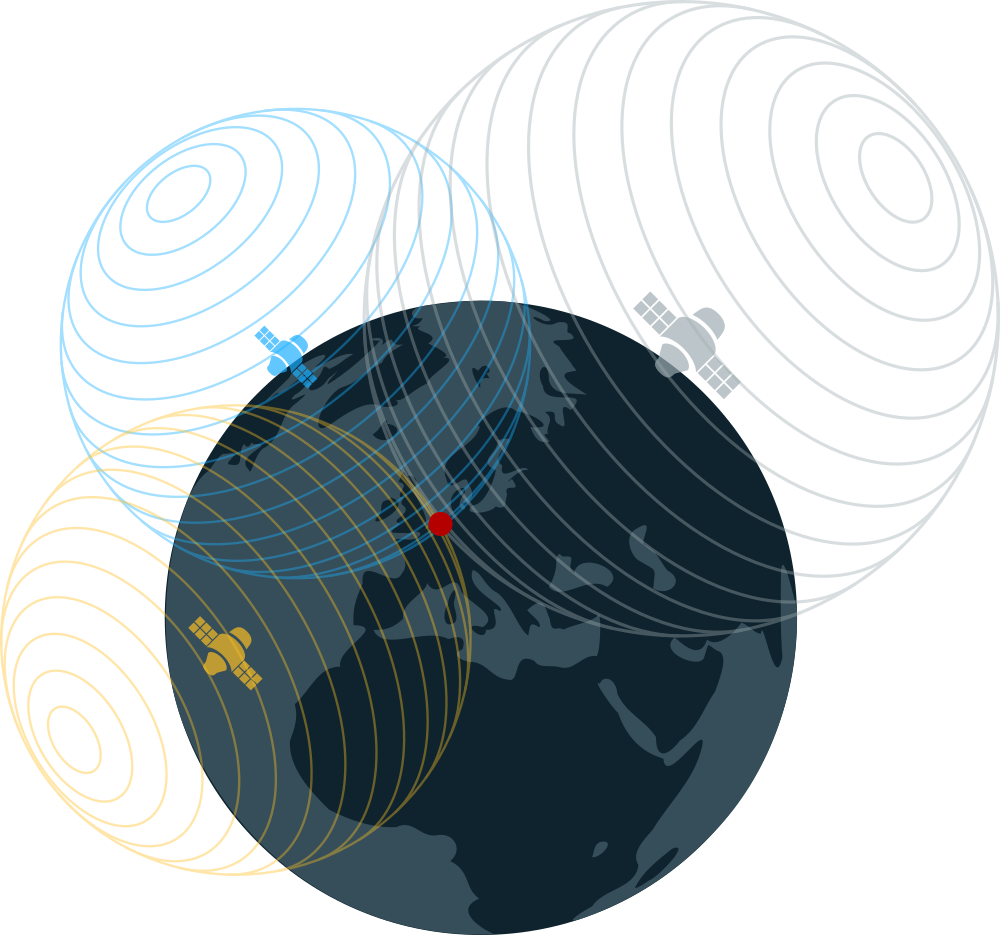
Tous ces systèmes s’appuient sur le même principe, dit de multilatération : à tout instant, le récepteur calcule sa propre position à partir des mesures de distance entre lui-même et un ensemble de satellites artificiels dont la position est connue avec précision.
En pratique, ces systèmes s’appuient sur des constellations de satellites placés en orbite à environ 20 000 km de la Terre, chaque satellite émettant un signal contenant sa position précise sur son orbite, ainsi que la date et l’heure d’émission du signal.
En exploitant les signaux issus d’au moins quatre satellites, un récepteur GNSS est capable de déterminer sa position et la date avec des précisions respectives de l’ordre de 5-10 mètres et de la nanoseconde (dans le cas d’un récepteur GPS traditionnel). Le système Galileo, plus récent, permet une meilleure précision de positionnement, de l’ordre du mètre.
Quelles sont les limites de l’utilisation de ce système ?
La localisation par satellite, bien qu’elle soit largement utilisée et efficace dans de nombreux cas, présente cependant certaines limites importantes à prendre en compte.
La position calculée par un récepteur GNSS est entachée d’erreurs en raison d’effets dits atmosphériques tels que la réfraction des signaux lors de leur traversée des différentes couches de l’atmosphère. Une météo défavorable (couverture nuageuse, température, humidité) peut également dégrader la mesure de distance entre les satellites et le récepteur, ce qui entraîne une diminution de la précision du positionnement. Ces effets peuvent être corrigés en utilisant un système de GNSS différentiel.
Dans les zones urbaines comprenant des bâtiments élevés, les réflexions sur les murs entourant le récepteur peuvent causer des biais de positionnement en faussant la mesure de la distance entre le récepteur et les satellites : les distances semblent plus grandes qu’elles ne sont réellement. Ce phénomène est qualifié de “multi-trajet” (multipath en anglais).
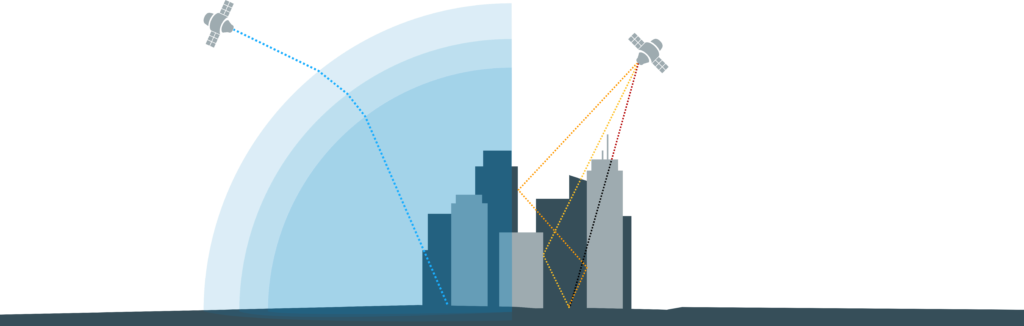
Un autre effet affectant la performance des systèmes GNSS est le masquage des signaux : en milieu urbain, ou dans des zones où la végétation est dense, le signal provenant de certains satellites peut être purement et simplement occulté, ce qui diminue la précision de la position calculée par le récepteur et peut aller, dans certains cas extrêmes jusqu’à empêcher son fonctionnement. C’est notamment le cas dans des environnements confinés ou souterrains, tels que les tunnels ou certains parkings.
Quand le GPS ne suffit plus : des applications en quête de solutions de localisation avancées
Pour certaines applications, les limites du système GPS que nous avons évoquées sont de véritables verrous. On distingue trois types d’applications qui nécessitent des solutions alternatives : les applications haute précision, les applications intérieures ou souterraines et les applications sensibles avec des enjeux de souveraineté.
Applications haute précision
Certaines applications, telles que les aides à la conduite ou les véhicules autonomes, exigent une localisation en temps réel de grande précision pour une navigation sécurisée.

Même dans des situations favorables à l’utilisation du GPS, une erreur de positionnement de l’ordre du mètre entraîne une déviation du système de navigation autonome, conduisant le véhicule à sortir de sa voie. En pratique, les véhicules évoluent souvent dans des environnements propices au multi-trajet ou aux phénomènes de masquage, qui dégradent encore davantage la performance du GPS. Pour garantir une conduite sécurisée, ces applications nécessitent des solutions plus fiables. Par exemple, une voiture autonome ne peut s’appuyer uniquement sur le GPS, mais devra observer les éléments de la route qui l’entourent (comme les marquages au sol) pour assurer son maintien dans sa voie de circulation.
Applications en intérieur, en tunnels ou sous-terrain
La localisation par satellite est inopérante dans les tunnels ou les souterrains, où le signal GPS est indisponible. Les opérateurs de trains et métros, par exemple, ne peuvent pas assurer les interdistances de sécurité entre les rames ou le suivi des flottes avec des technologies GPS. Il en est de même pour tout autre système évoluant dans un environnement intérieur, tel qu’un entrepôt, un parking couvert, ou tout autre lieu où les signaux des satellites sont bloqués.

Applications sensibles : disponibilité et souveraineté du système de géolocalisation
Passer par une solution GNSS implique d’être dépendant du service fourni par les satellites. Or, comme nous l’avons vu, plusieurs situations compromettent la disponibilité du système. Pour de nombreuses applications en temps réel, une indisponibilité, même de quelques secondes, peut entraîner des conséquences désastreuses pour la sécurité des usagers.
Par ailleurs, en cas de panne du service ou brouillage des signaux, l’opérateur ne sera pas maître de la situation et ne pourra agir sur le problème. Il devra attendre que la solution soit réglée par le gestionnaire du réseau GNSS, et ne peut donc garantir le fonctionnement de son système.
Des techniques de localisation avancées pour l’industrie de demain
Pour répondre à ces enjeux, il est possible d’utiliser des solutions de localisation s’appuyant sur des caméras ou des LiDARs (capteur laser). Ces alternatives au GPS permettent une navigation précise en temps réel, tant à l’intérieur des bâtiments que dans des environnements extérieurs complexes.

Dans un article à venir, nous découvrirons comment ces technologies permettent de se localiser avec précision dans des environnements où le GPS atteint ses limites.
Nous expliquerons les grands principes de fonctionnement de nos algorithmes et en quoi ils permettent aux industriels du ferroviaire et de l’automobile d’accéder à une navigation intelligente, fiable et adaptée à leurs besoins.
Pour suivre comment ces technologies offrent de nouvelles perspectives aux applications industrielles de demain, rejoignez-nous sur notre page LinkedIn.

